インテリジェント
フィンガー搭載
ロボットハンド Think Hand F
近接覚センサーを備えた
「インテリジェントフィンガー」を組み合わせた
ロボットハンド「Think Hand F」は、
人の指先のように
「なぞって、まさぐり、つかみにいく」動作で
柔軟なピッキングを実現します。
部品や食品のばら積みピッキングが容易になり、
導入が諦められていた現場を含めて
ロボットハンド活用の幅が広がります。
「なぞって、まさぐり、つかみにいく」インテリジェントフィンガー
搭載ロボットハンドの特長
-
01
人の手先・指先に迫る
ソフトタッチ制御近接覚センサーを備えた「インテリジェントフィンガー」により、対象物の形状に応じて自在に対応できるソフトタッチ制御を実現しました。カメラシステムでは対応が困難だったばら積み部品に対しても、「なぞって、まさぐる」ことで位置や姿勢を特定して「つかみにいく」ことができます。さらには、不定形なものや柔らかいもののピッキングにも対応できることから、ロボットハンドの導入・活用領域が格段に広がります。

-
02
把持状況を検知し、
素早いリトライも「Think Hand F」のインテリジェントフィンガーは、内蔵された近接覚センサーの高精度なセンシングにより、“指先“の把持状況を瞬時に検知。ロボットハンドの作業効率を左右する「把持の精度」を向上させるだけでなく、把持の成否をリアルタイムで認識・判断します。素早いリトライ(つかみなおし)が可能となるため、生産効率のアップに貢献します。

-
03
ラフなティーチングでの
運用が可能固定の座標でのピッキングを原則としてきた従来のロボットハンドとは異なり、 「Think Hand F」は “指先“を対象物に接触させながら、「なぞって、まさぐり、つかみにいく」動作を実現します。その状況に応じて柔軟な対応ができることから、事前のティーチングの手間が大幅に軽減され、運用のハードルも低くなります。

Think Hand Fのしくみ
-
01
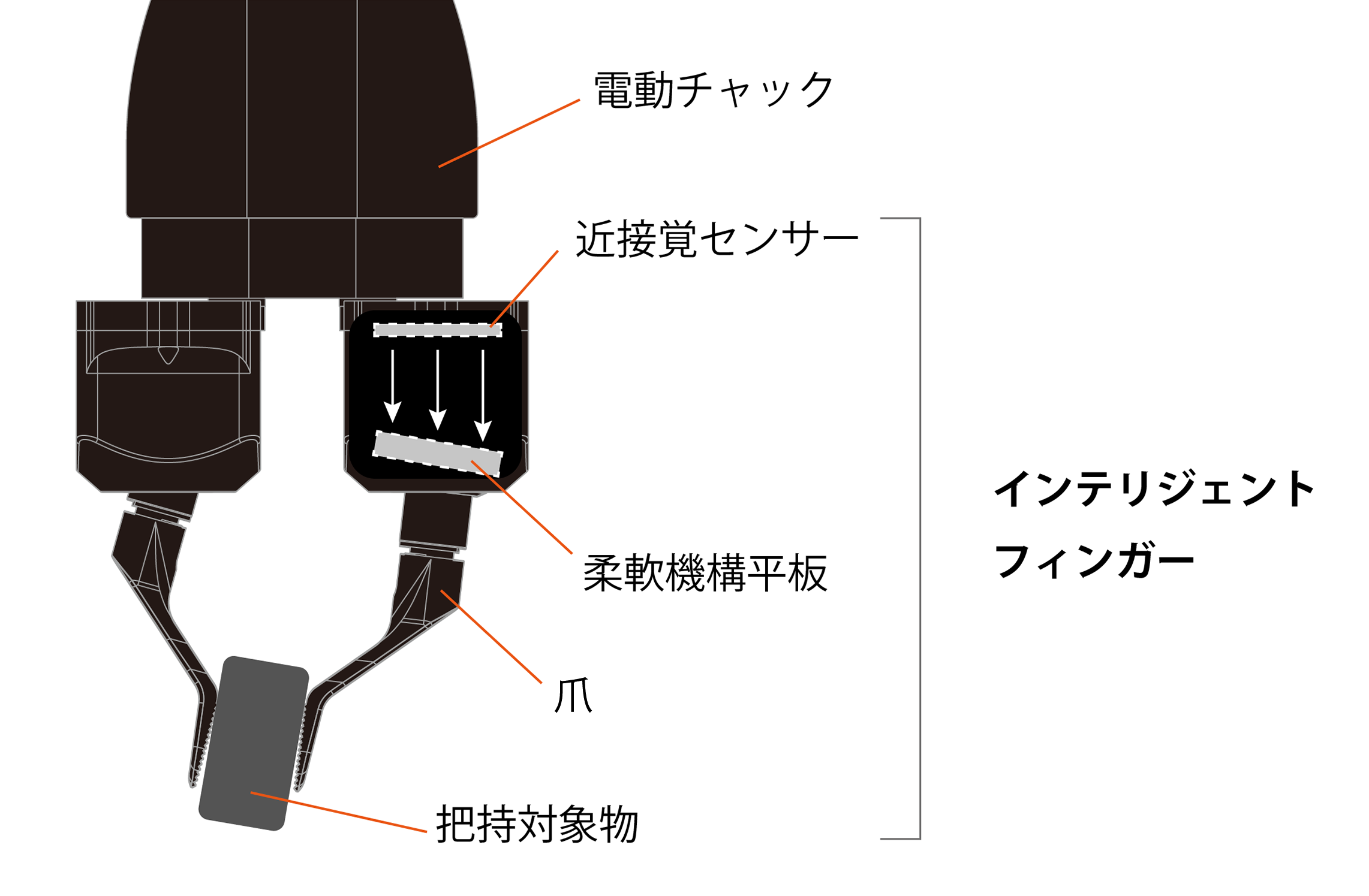
近接覚センサーを備えたインテリジェントフィンガーによるソフトタッチ制御
柔軟機構平板の角度と距離を常時測定し続けることで、
爪が対象物に倣って自由に動き、対象物の形状を把握。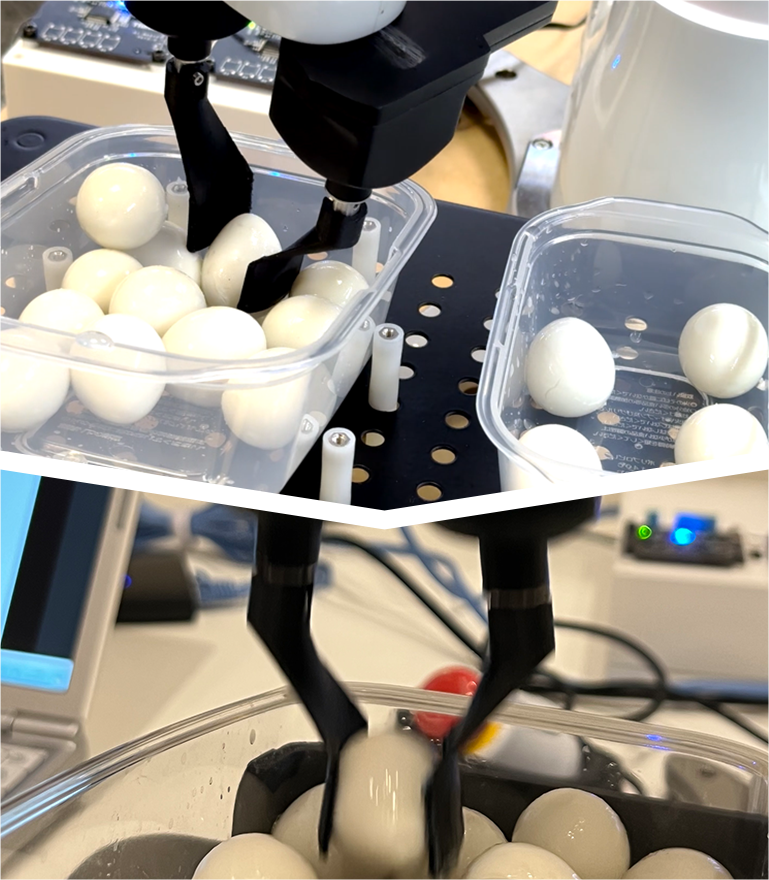
-
02
インテリジェントフィンガーの姿勢をロボット制御へ反映
近接覚センサーが爪の姿勢を把握し、高速でロボット制御に反映することで、対象物に倣ったピックアップを実現。
仕様概要
-
ハンド寸法
102 mm × 82 mm × 98 mm ※グリッパ部を除く
-
可搬重量
約 300 g ※当社指定グリッパ使用時
-
本体重量
180 g ※グリッパ部を除く
-
電源電圧
5 V
-
使用温度
0 ~ 40 ℃
-
サンプリングレート
最大 200 Hz
※可搬重量は使用されるロボットにより異なります。詳細はお問い合わせください。
※仕様は予告なく変更されることがあります。
よくあるご質問
- 動作原理を教えてください。
- Think Hand Fのしくみをご覧ください。
- ハンドが持てる最小のワークサイズを教えてください。
- ワークの形状や一度に把持したい個数によって異なります。詳細はお問い合わせください。
- ハンドが持てる最大のワークの重さを教えてください。
- 当社の動画で使用しているCobottaに取り付けた場合、約300グラムまでの把持が可能です。
カスタム対応についてはお問い合わせください。 - ハンドの把持力はどれくらいですか?
- 開発中のプロトタイプでは1N程度です。カスタム対応についてはお問い合わせください。
- 購入後、ワークが変わる度に機械学習をする必要はあるのでしょうか?
- 機械学習させた近接覚センサーをThink Hand Fに内蔵しています。お客様で新たに機械学習の必要はありません。
- 耐環境性能を教えてください。
- 開発中のプロトタイプの段階では、使用温度範囲は0~40度、防塵・防水機能は備えていません。
※空気中に油分が浮遊している環境や、近接覚センサーを設置しているBOXに液体が直接噴霧される環境では、BOX内への液体侵入防止の対策をしてご使用ください。 - ロボットとどのように通信をするのでしょうか?
- TK-01Nからシリアルデータを小型LinuxPCに取り込み、フィンガーの開きや潜り込む量を算出し、ロボットコントローラーに手先座標の指令を送っています。
通信方式についてはパンフレットを参照ください。パンフレットはこちらからお問い合わせください。 - どの様なロボットで使用可能か教えてください。
- 外部制御モードがついているロボットや、電動チャック付きで外部制御が可能なロボットであればご使用いただけます。
接続実績があるロボットに関してはお問い合わせください。 - ロボットコントローラー側で必要なプログラムは?
- 仲介する小型PCでロボットを外部からリモート制御する場合、ロボットコントローラ側はリモート制御に関する設定や可動域等の設定のみ必要です。
- 爪の種類は変更可能か?
- 具体的なご要望をお問い合わせください。