The future,
ご訪問いただきありがとうございます。当ウェブサイトのより良い情報提供・サービス向上のため、Cookieの取得と利用に同意をお願いしています。
製品情報
( PRODUCT )
01
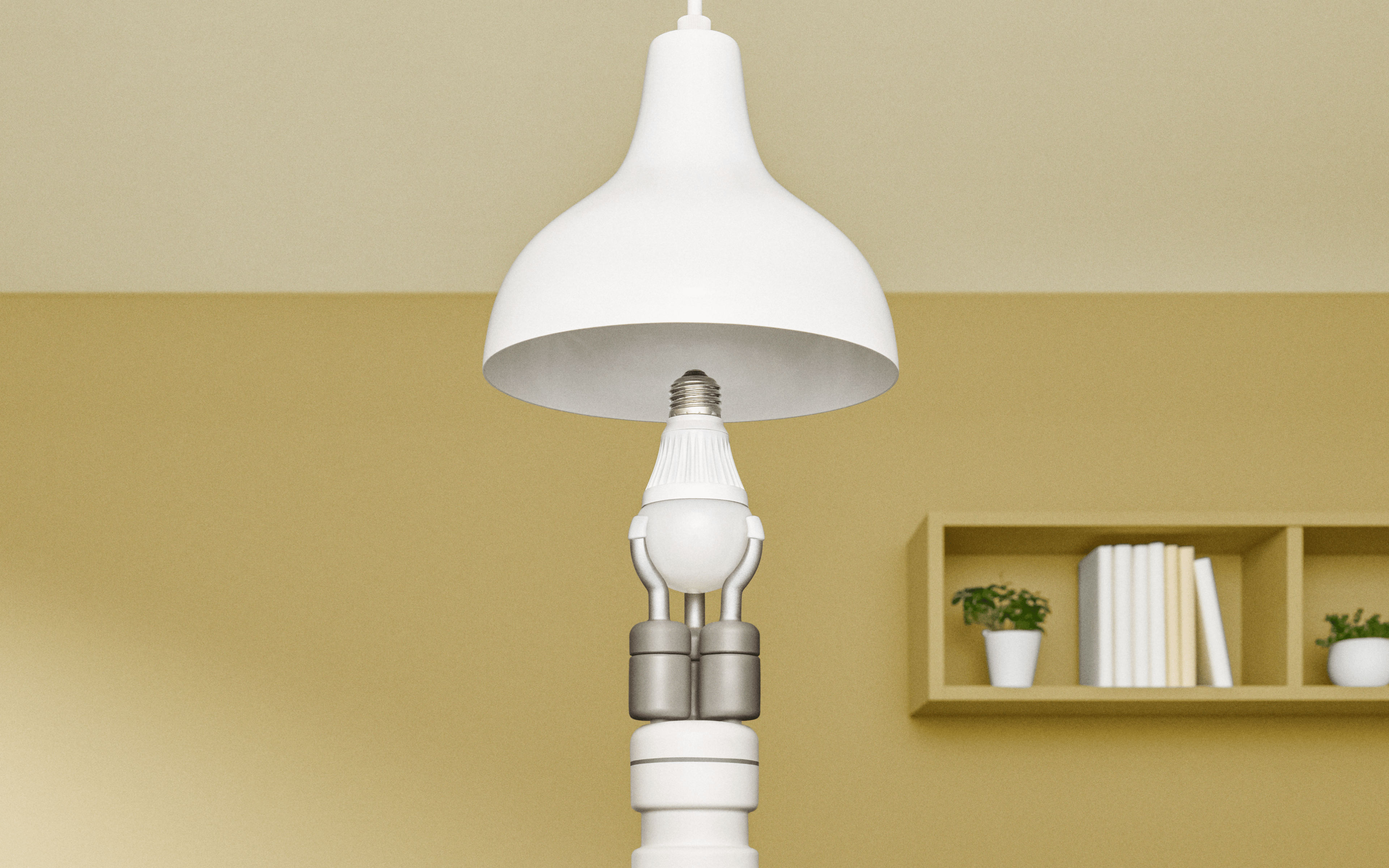
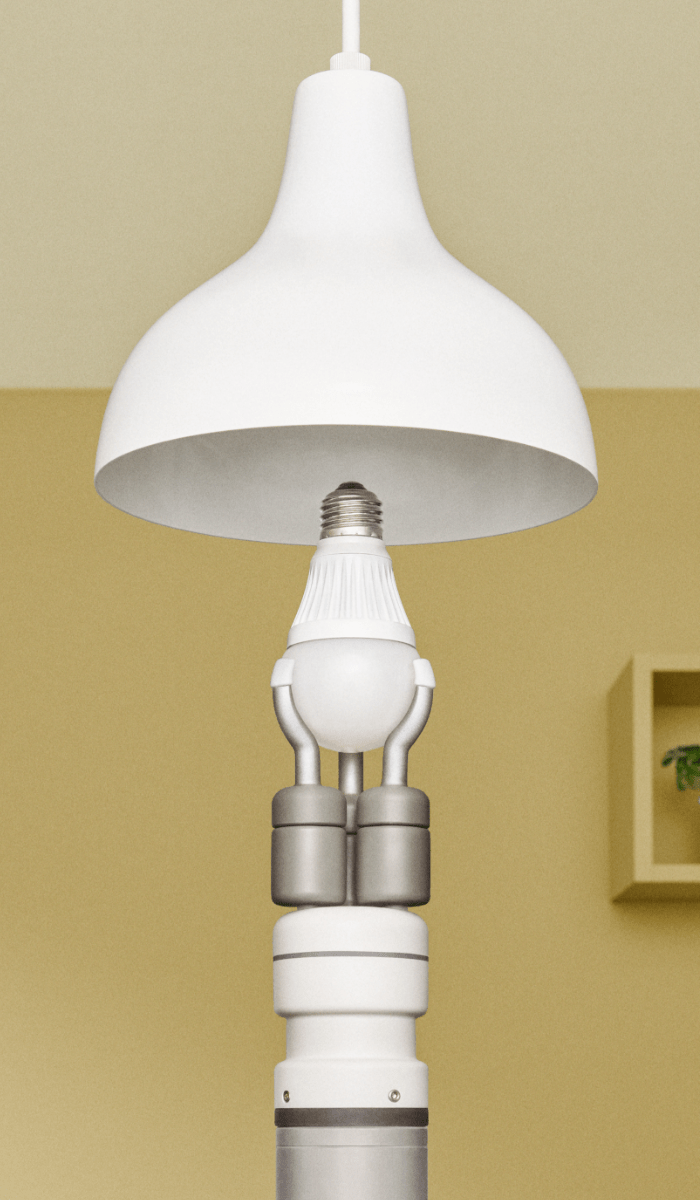
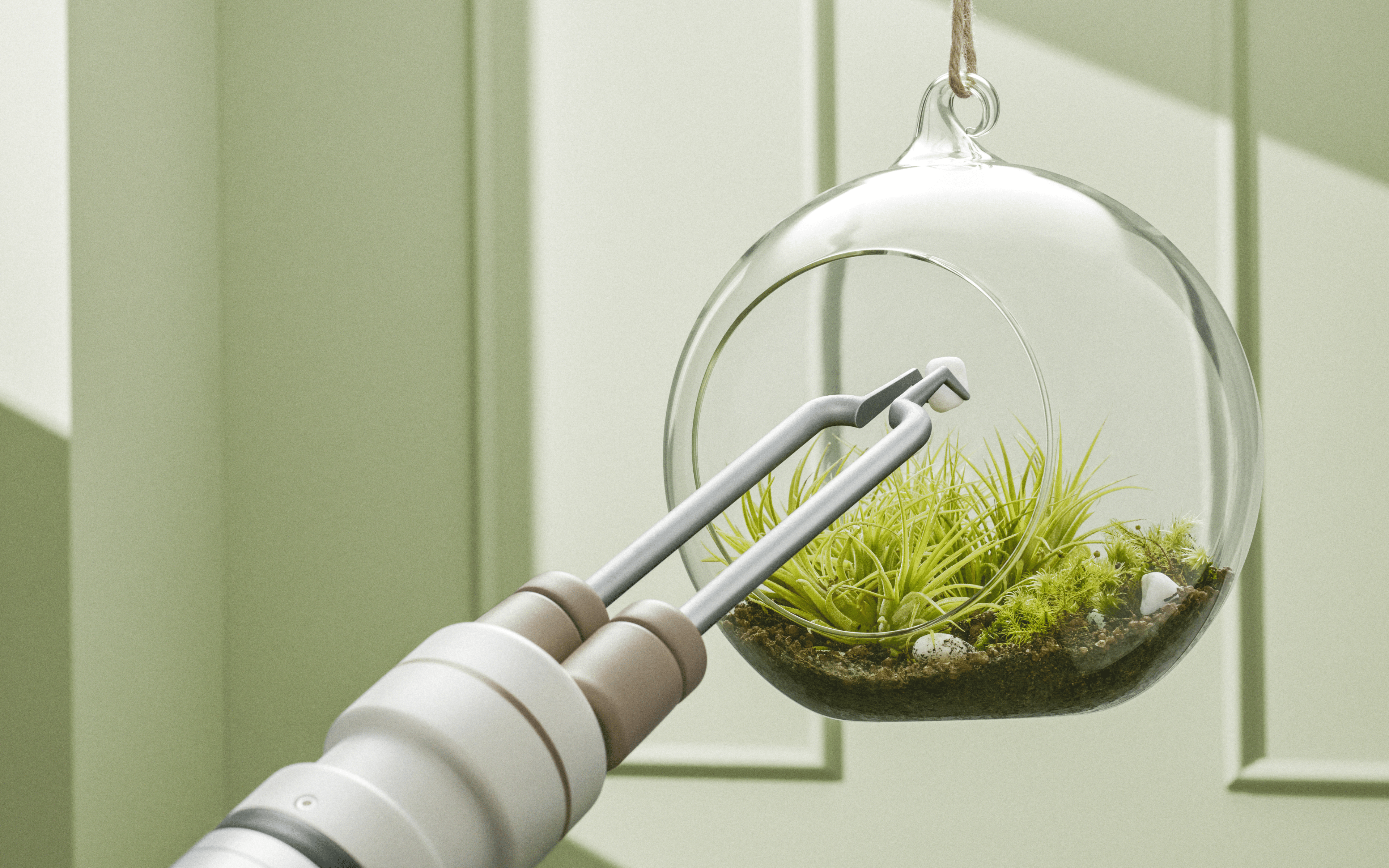
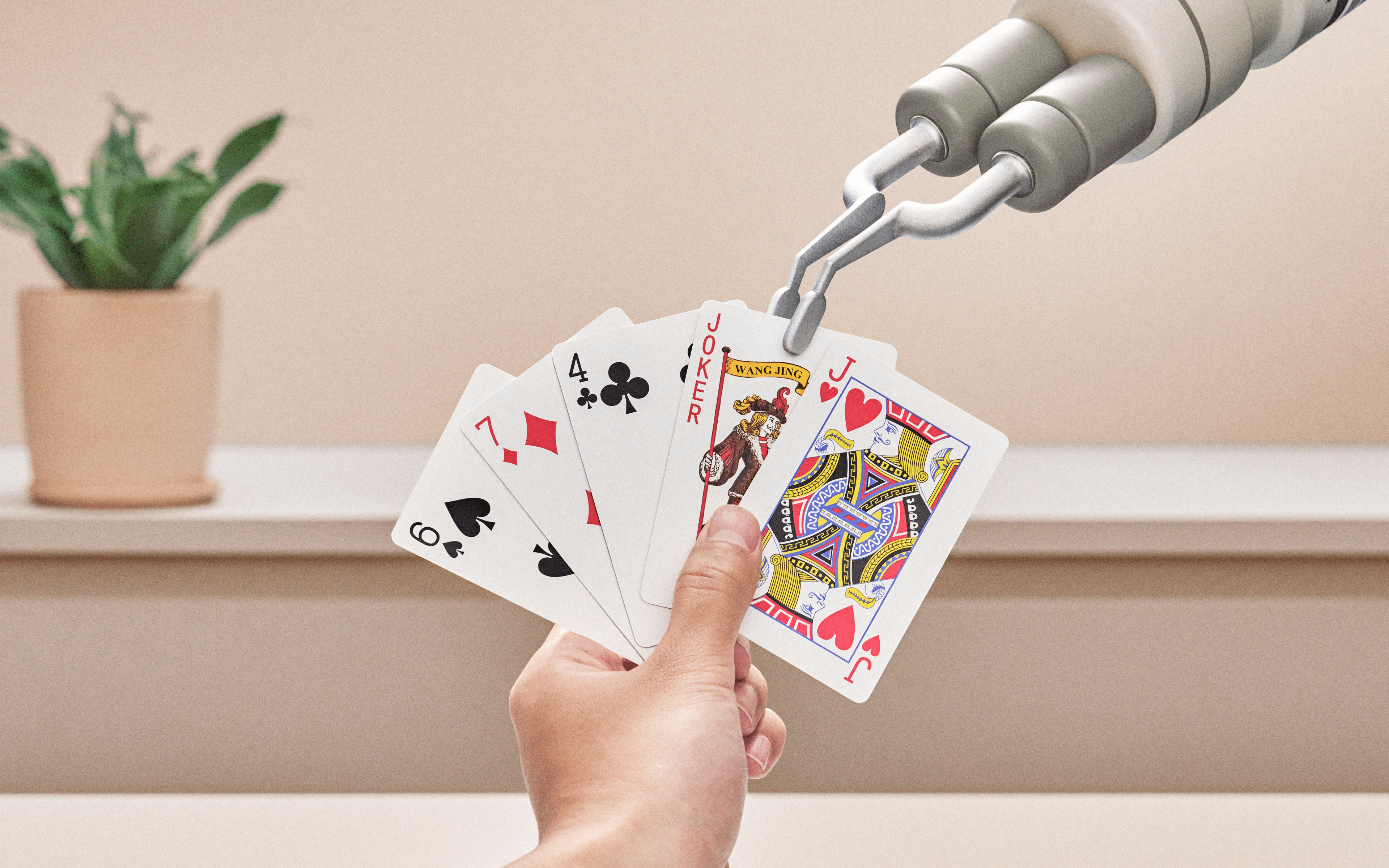
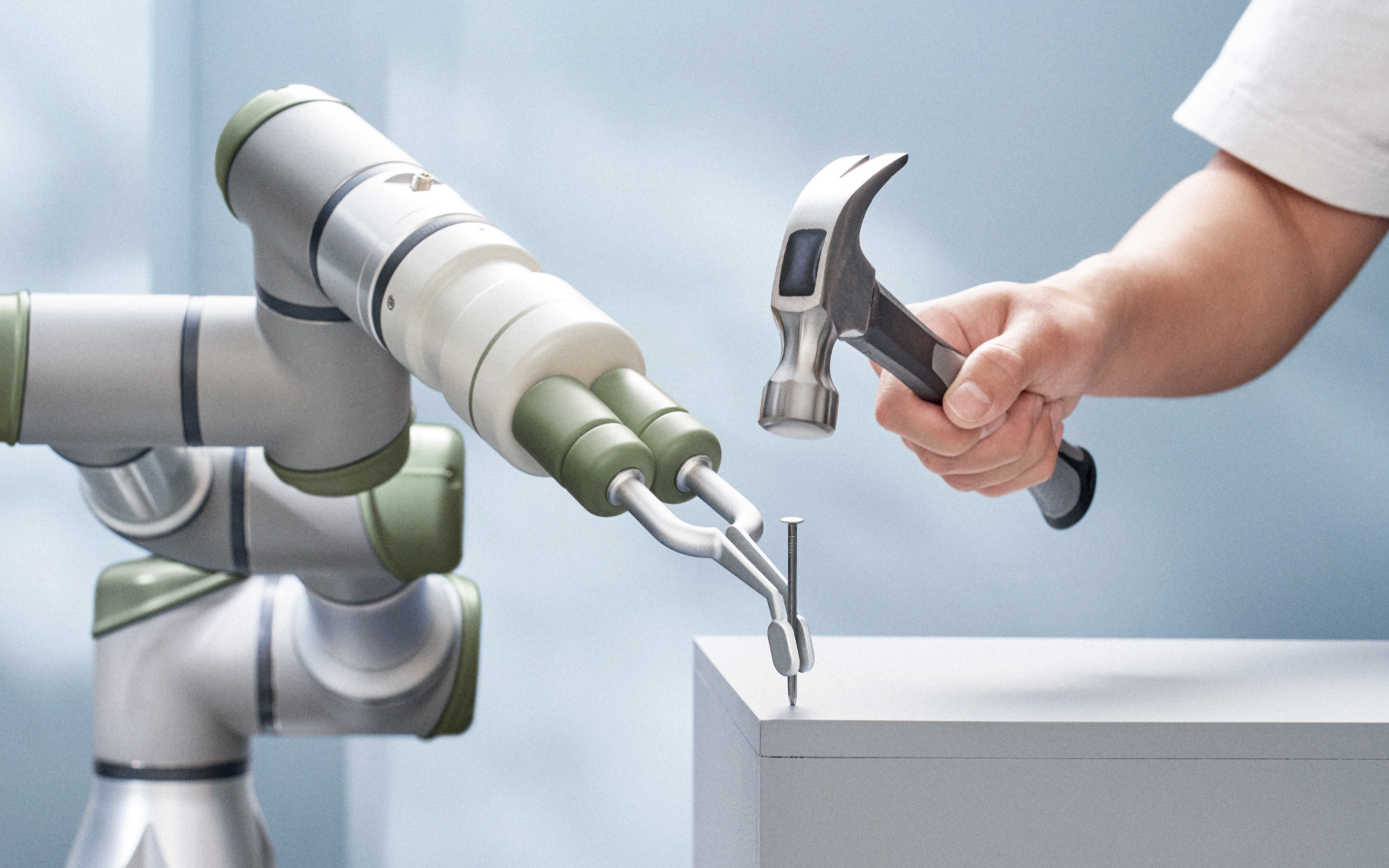
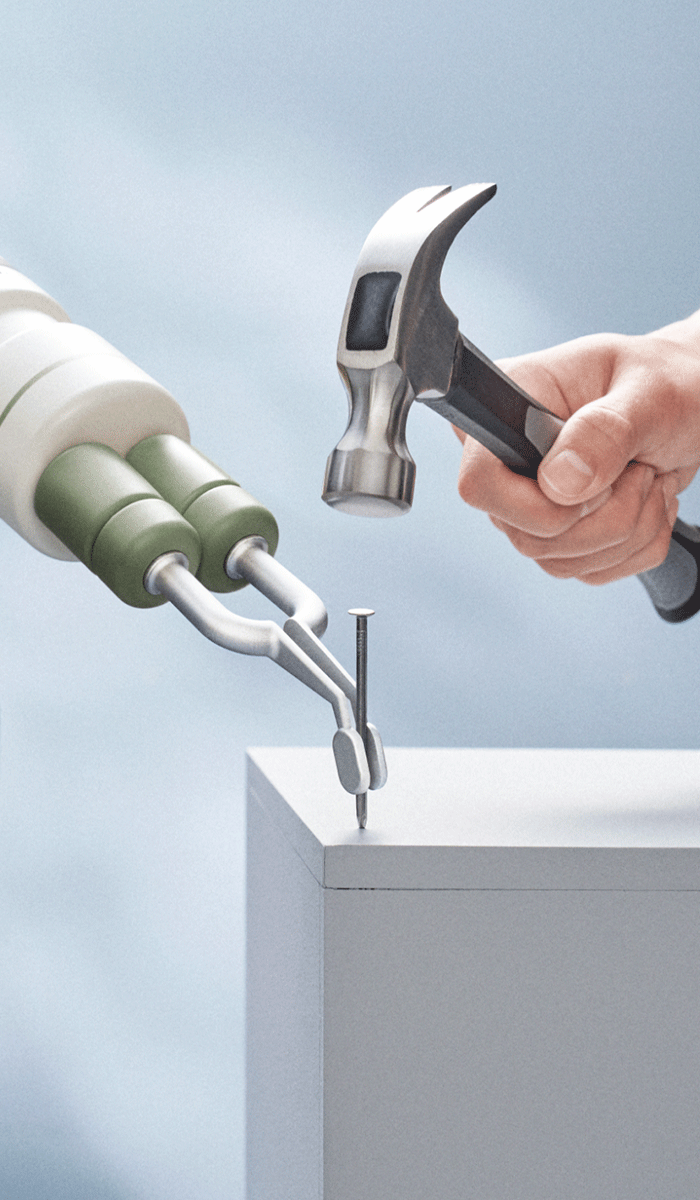
“つかむ”も“置く”も 手探りできるロボットハンド
02
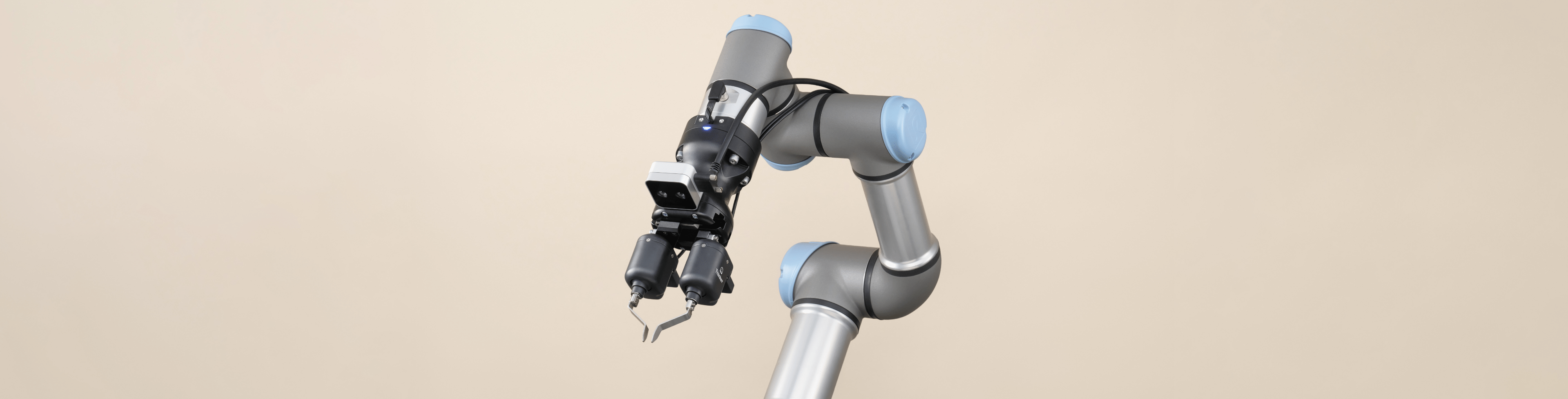
人手不足解消の切り札、 協働ロボットパッケージ
03
独自開発のAIモデル搭載の センシングテクノロジー
新着情報
ついに、バラ積みピッキングが最大半額補助対象に!当社製品が第一号として登録 ~経産省推進の中小企業省力化投資補助金に「Thinker Model A」の登録完了~
Thinkerがサービス拡充のため本社オフィスを移転
Thinker CTO 中野が大阪大学ナノ理工学人材育成産学コンソーシアム主催「ナノ理工学情報交流会」に登壇
YUASAグループ主催『関東グランドフェア2026』出展協力
展示会『ROBOT TECHNOLOGY JAPAN2026』出展
【ラジオ出演】8月の土曜日(全5回)ラジオ大阪「サイラジ!光の未来探検」に取締役 小山が出演
【テレビ出演】7月26日(日) BS10 「加藤浩次×鈴木おさむのビジネスサバイブ」にCEO藤本が出演
本社オフィスを移転しました。
会社概要
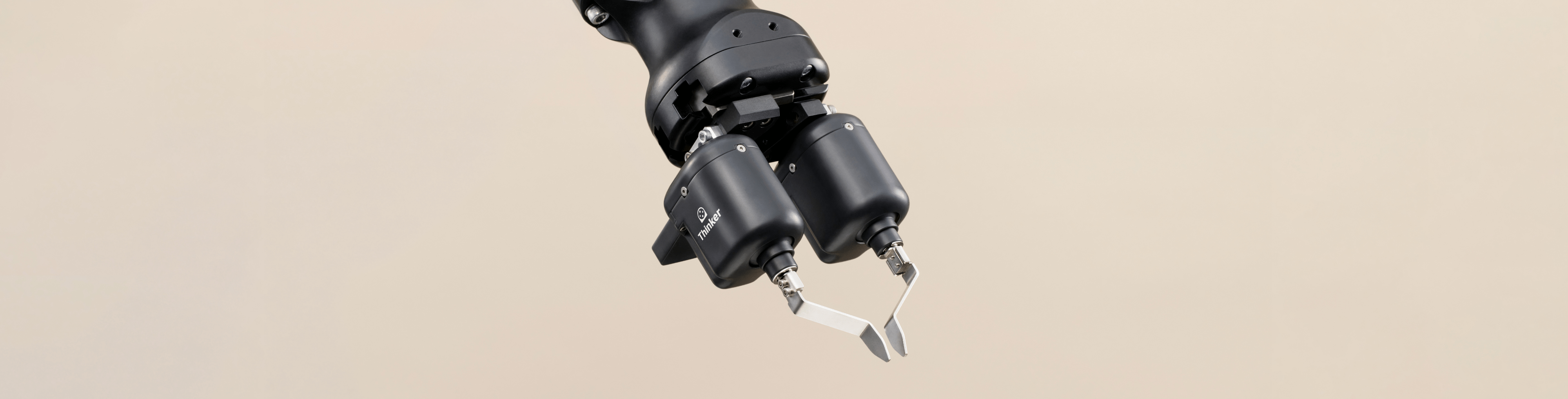
Thinkerのロボットハンドについて、もっと詳しく