近接覚センサー TK-01N / TK-01G(開発中)
近接覚センサーは、
赤外線と独自のエッジAIの組み合わせにより、
対象物との「距離および姿勢」を
非接触かつ高分解能で
リアルタイムに計測できるセンサーです。
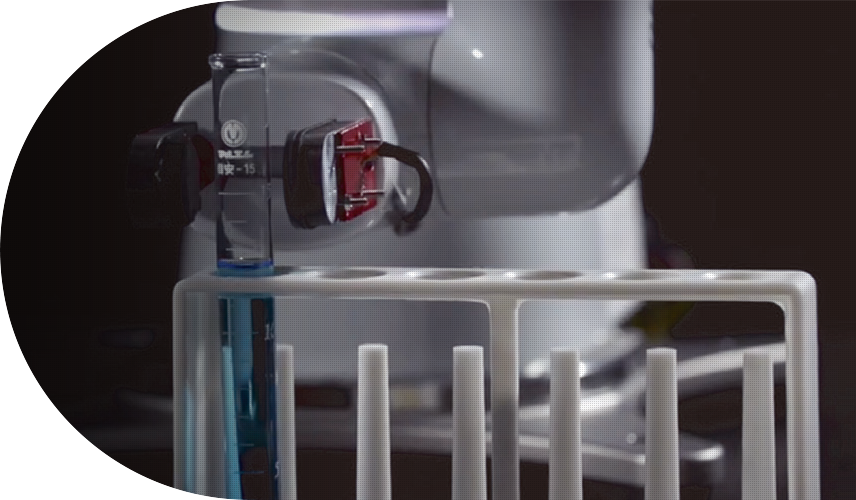
従来は困難とされていた透明物や
鏡面物の計測も可能で、
これまで導入が諦められていたさまざまな現場でも
ロボットハンドを活用できるようになります。
対象物の距離・姿勢を読み取って
ロボットハンドの「つかむ」を進化させる近接覚センサーの特長
-
01
扱いづらかったモノも
扱えるように独自開発の赤外線機構とエッジAIを搭載した「近接覚センサー TK-01シリーズ」を用いれば、対象物の「距離および姿勢」の計測ができ、形状が一定でないモノや柔らかなモノ、ランダムに配置されたモノの捕捉も可能となります。加えて、従来の光センサーやカメラが苦手としていた透明物や鏡面物の計測もできることから、これまで導入が見送られてきた用途や現場・領域でもロボットハンド活用の可能性が広がります。
-
02
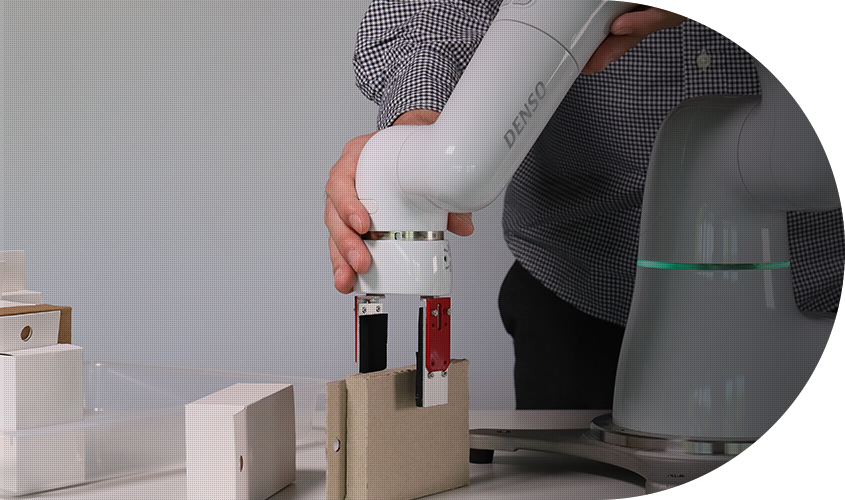
ティーチングが楽になり、
生産性もアップ「近接覚センサー TK-01シリーズ」を搭載したロボットハンドは、リアルタイムで対象物を計測しながら、ロボット自身で指先位置を微調整できるため、“ラフなティーチング“での運用が可能です。作業種別ごとのアルゴリズム変更も最小限で済み、SIerの設定作業や現場技術者の運用負担を軽減できます。段取り替えのセッティング時間も短縮できることから、多品種ラインでの「生産性向上」「生産コスト低減」にも貢献します。
近接覚センサーのしくみ
-
01
赤外線の拡散発光と受光
4つの赤外線モジュールで対象物との距離と角度に
応じた反射光量を測定。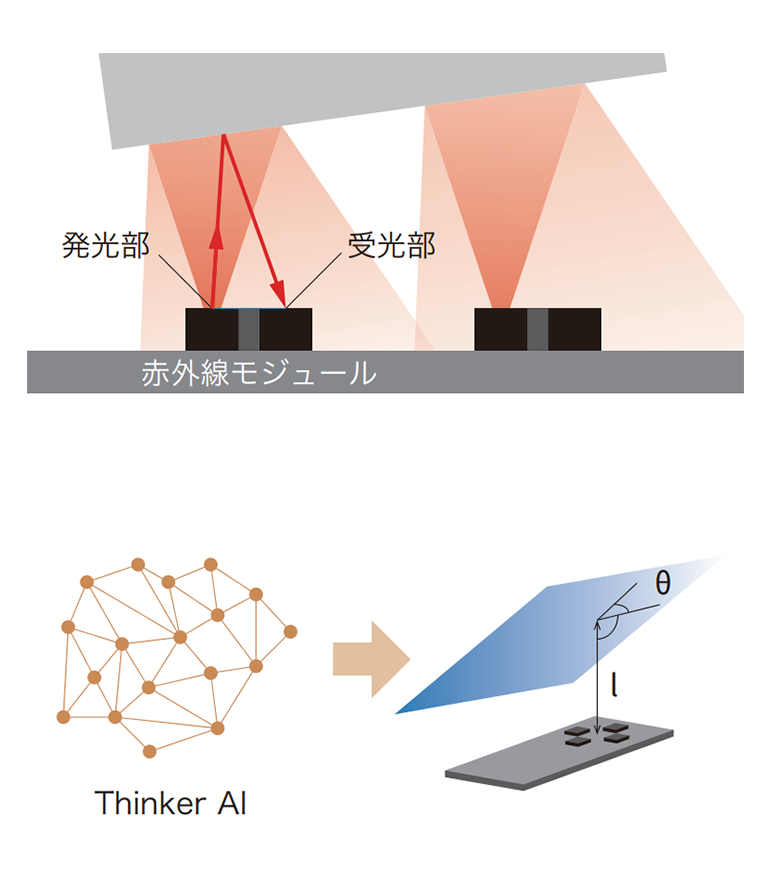
-
02
軽量AIモデルにより距離と角度を推論
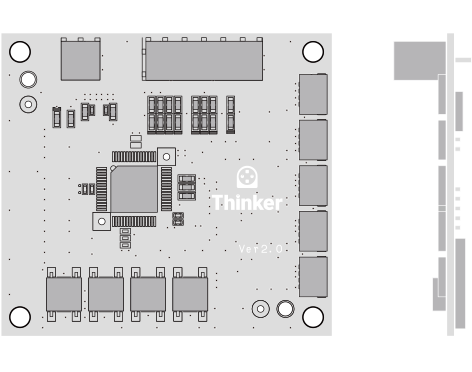
軽量AIモデル「Thinker AI」が素材ごとに
異なる反射光量の影響を吸収し、距離と角度に変換。 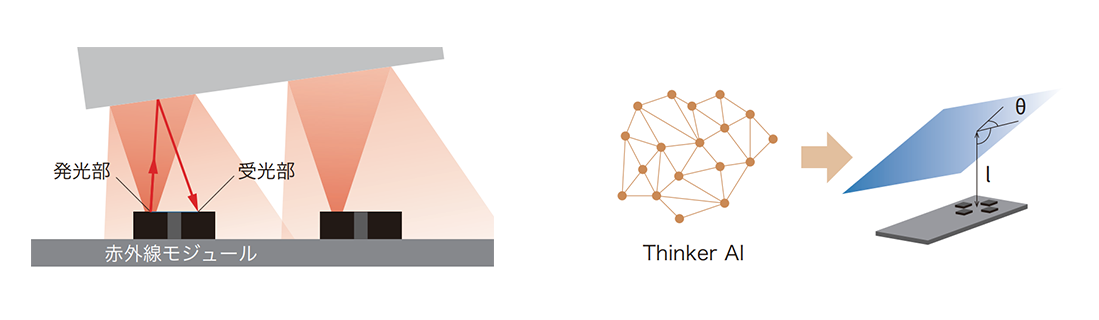
製品仕様
-
測定内容
距離、ピッチ軸・ヨー軸角度
-
測距範囲
1.5 ~ 20.0 mm (分解能 0.1 mm)
-
測角範囲
-20.0 deg ~ +20.0 deg (分解能 0.5 deg)
-
最大応答速度
約 5 ms
-
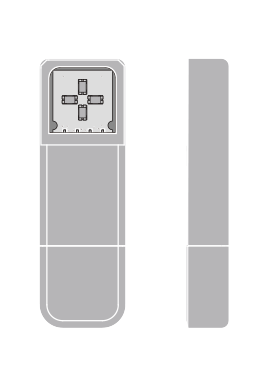
センサー部サイズ
55 mm (L) × 15 mm (W) × 2.5 mm (D)
-
AI基板サイズ
55 mm (L) × 60 mm (W) × 14 mm (D)
-
センサー部重量
約 3 g
-
使用周囲温度
0 ~ 40 ℃ (結露なきこと)
-
電源電圧
5 V
-
防水・防塵
-
-
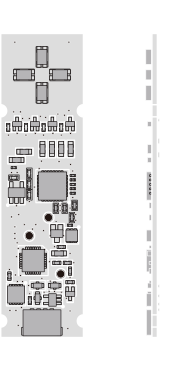
外形寸法図(単位:mm)
-
測定内容
距離、ピッチ軸・ヨー軸角度
-
測距範囲
1.5 ~ 20.0 mm (分解能 0.1 mm)
-
測角範囲
-20.0 deg ~ +20.0 deg (分解能 0.5 deg)
-
最大応答速度
約 5 ms
-
センサー部サイズ
69 mm (L) × 22 mm (W) × 11 mm (D)
-
AI基板サイズ
55 mm (L) × 60 mm (W) × 14 mm (D)
-
センサー部重量
約 35 g (ケーブル 1 m含む)
-
使用周囲温度
0 ~ 40℃ (結露なきこと)
-
電源電圧
5 V
-
防水・防塵
IP65 (予定)
-
外形寸法図(単位:mm)
※通信方式はカタログを参照ください。
※仕様は予告なく変更されることがあります。
よくあるご質問
- TK-01NとTK-01G(開発中)の違いは何ですか?
- TK-01Gは、センサー基板を水滴や汚れから守るために保護ケースに入れています。TK-01Nは赤外線モジュールへ異物が付着しない環境下などでセンサー基板をそのままお使いいただくタイプです。
- 動作原理を教えてください。
- 4つの赤外線モジュールと、エッジAIにより対象物との距離と角度を推論しています。詳細はこちら
- センサーの精度を教えてください。
- 距離の分解能は0.1㎜、角度は分解能0.5度です。
- ハンドへの設置方法を教えてください。
- TK-01G:センサー背面に固定用の穴でネジ止めにて設置して下さい。
M3ネジ×4箇所。ネジ位置はカタログの外形寸法よりご確認ください。
TK-01N:センサー基板のエッジ部分に設けた半円の切り欠きにネジ止めにて設置してください。
M2ネジ×4箇所。ネジ位置はカタログの外形寸法よりご確認ください。
カタログはこちらからお問合せください。 - センサー面の保護方法を教えてください。
- センサー面にワークが接触しないように、ハンドのワーク把持面からは段差を付けた設置をお願いします。
- 購入した後に設定などは必要ですか?
- 出荷時に様々な色のワークに対応できるようキャリブレーションされていますので、お客様が設定する必要はほとんどありません。
ただし透明なワークを測定する際には、センサーの光量を強める設定が必要です。 - 検出できるワークに制限はありますか?
- 赤外光のフォトリフレクタを使用しているので、センサーの受光部に十分な光が返って来ない場合は検出が不可となります。
例えば艶がない黒色のワークや、表面に細かい凹凸があるスポンジなどは、検出できないケースもあります。
また、スポット径よりも細いものも検出が難しい場合があります。
詳しくはお問合せください。 - スポット径を教えてください。
- 拡散反射式のセンサーを使用しており、距離が離れるに応じてスポット径は広くなります。近距離では約15㎜程度です。
- センサーが汚れた場合でも測定はできますか?
- センサー受光部に十分な光が返ってこないと検出が不可となりますので、投受光部分への汚れ付着にはご注意ください。
通常の反射型光センサーが動作できない環境では、TK-01シリーズも測定が難しいケースが多いです。 - ロボットとの通信形態を教えてください。
- カタログのシステム構成をご確認ください。
カタログはこちらからお問合せください。 - 必要な電源を教えてください。
- 5V、500mAの電源供給が必要です。
- どんなロボットであれば使用可能でしょうか?
- カタログのシステム構成をご確認ください。
カタログはこちらからお問合せください。