PRODUCT
近接覚センサー
独自開発のAIモデル搭載の
センシングテクノロジー
PRODUCT
独自開発のAIモデル搭載の
センシングテクノロジー
( ABOUT )
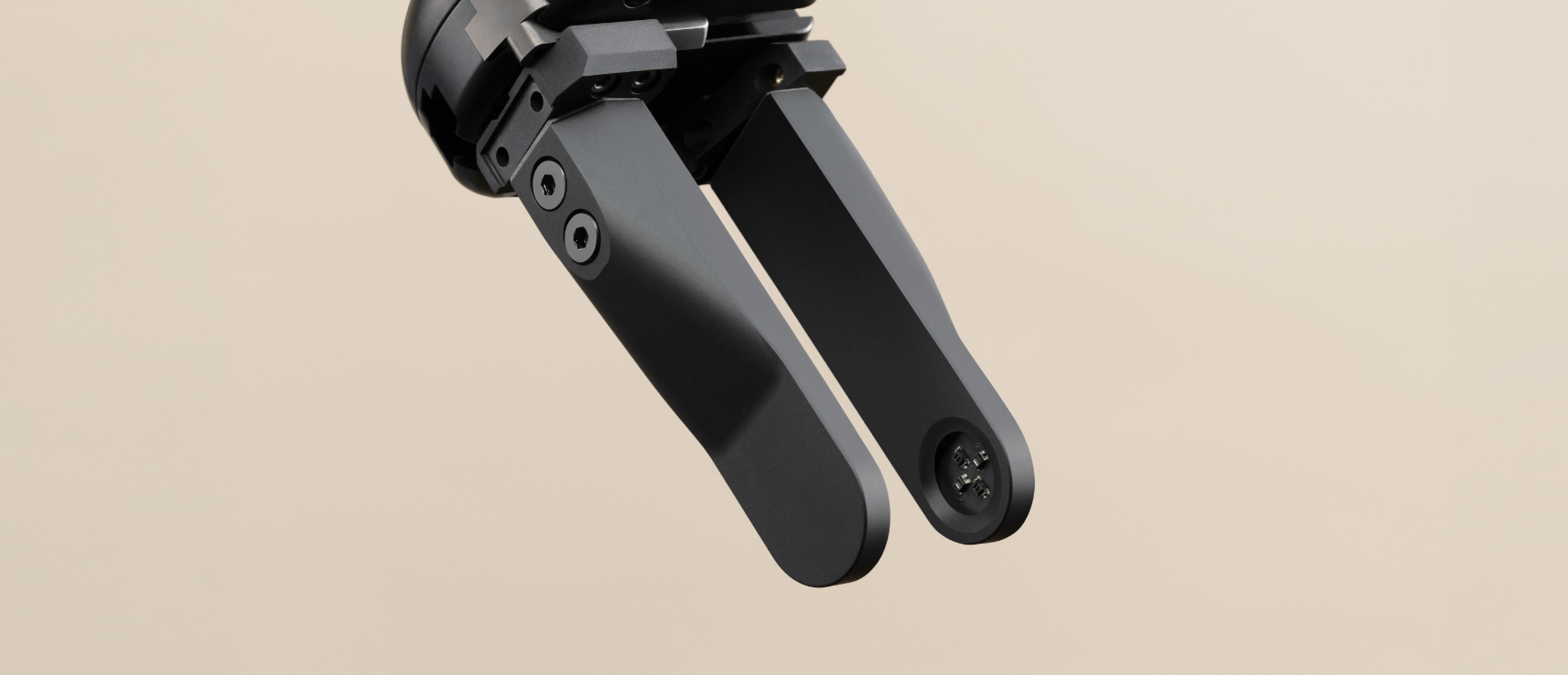
近接覚センサーは、赤外線と独自のエッジAIの組み合わせにより、対象物との「距離および姿勢」を非接触かつ高分解能でリアルタイムに計測できるセンサーです。従来は困難とされていた透明物や鏡面物の計測も可能で、これまで導入が諦められていたさまざまな現場でもロボットハンドを活用できるようになります。
対象物の距離・姿勢を読み取って
ロボットハンドの「つかむ」を進化させる
( FEATURE )
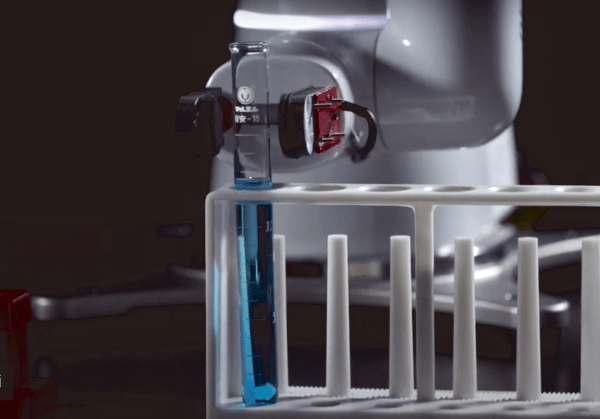
独自開発の赤外線機構とエッジAIを搭載した「近接覚センサー TK-01シリーズ」を用いれば、対象物の「距離および姿勢」の計測ができ、形状が一定でないモノや柔らかなモノ、ランダムに配置されたモノの捕捉も可能となります。加えて、従来の光センサーやカメラが苦手としていた透明物や鏡面物の計測もできることから、これまで導入が見送られてきた用途や現場・領域でもロボットハンド活用の可能性が広がります。
FEATURE #01
FEATURE #02
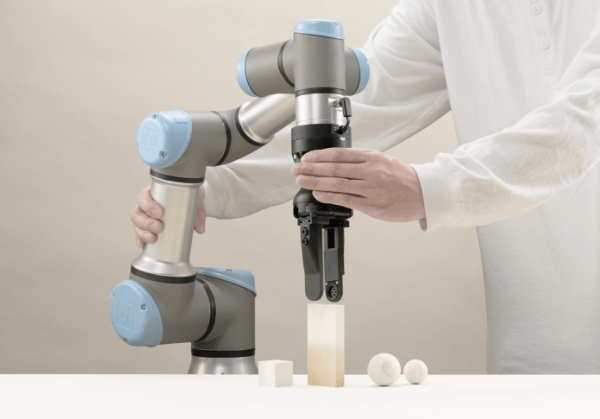
「近接覚センサー TK-01シリーズ」を搭載したロボットハンドは、リアルタイムで対象物を計測しながら、ロボット自身で指先位置を微調整できるため、”ラフなティーチング”での運用が可能です。作業種別ごとのアルゴリズム変更も最小限で済み、SIerの設定作業や現場技術者の運用負担を軽減できます。段取り替えのセッティング時間も短縮できることから、多品種ラインでの「生産性向上」「生産コスト低減」にも貢献します。
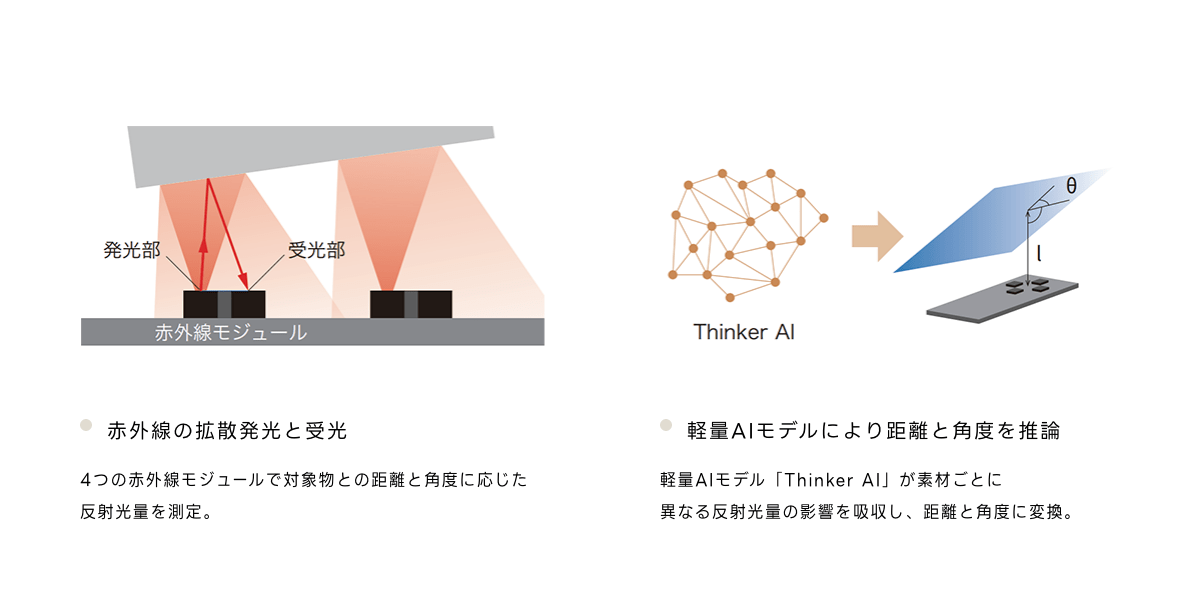
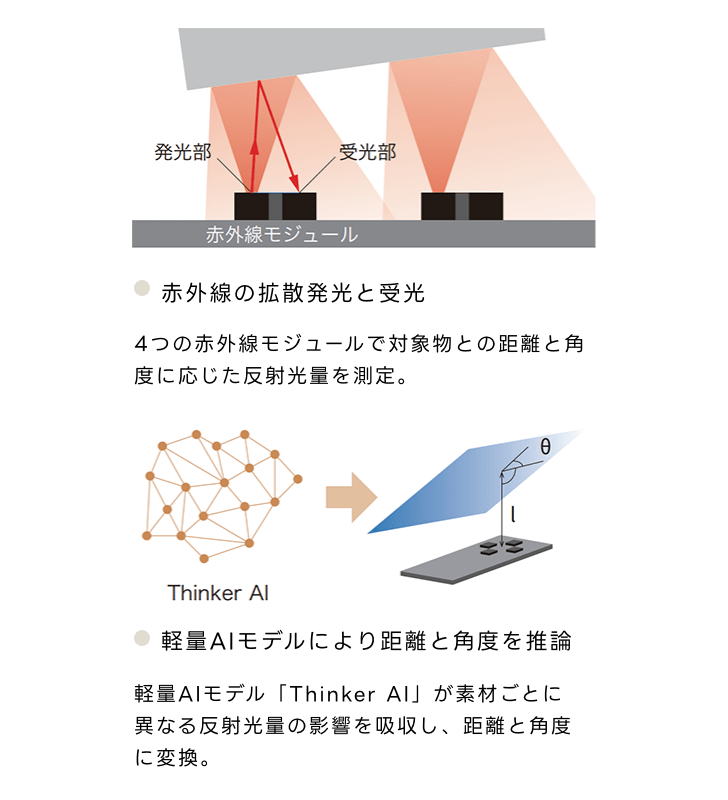
( STRUCTURE )
( SPEC )
測定内容
距離、ピッチ軸・ヨー軸角度
測距範囲
1.5 ~ 20.0 mm (分解能 0.1 mm)
測角範囲
-20.0 deg ~ +20.0 deg (分解能 0.5 deg)
最大応答速度
約 5 ms
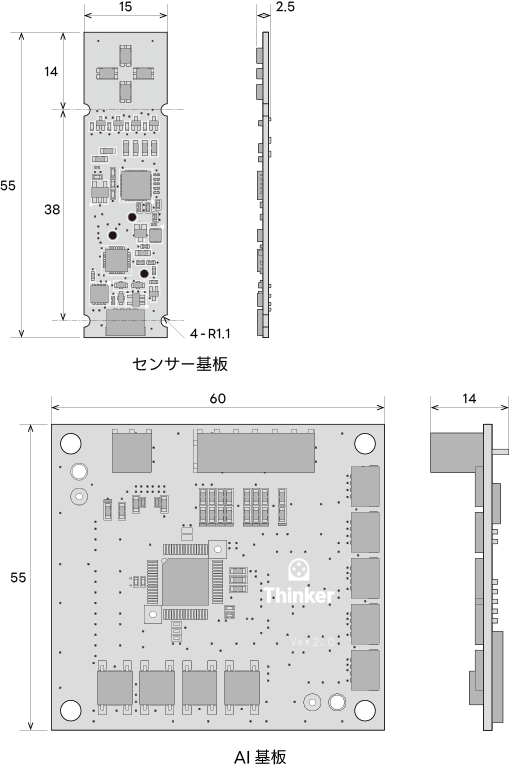
センサー部サイズ
55 mm (L) × 15 mm (W) × 2.5 mm (D)
AI基板サイズ
55 mm (L) × 60 mm (W) × 14 mm (D)
センサー部重量
約 3 g
使用周囲温度
0 ~ 40 ℃ (結露なきこと)
電源電圧
DC5V
防水・防塵
–
外形寸法図(単位:mm)
※通信方式はカタログを参照ください。
※仕様は予告なく変更されることがあります。
測定内容
距離、ピッチ軸・ヨー軸角度
測距範囲
1.5 ~ 20.0 mm (分解能 0.1 mm)
測角範囲
-20.0 deg ~ +20.0 deg (分解能 0.5 deg)
最大応答速度
約 5 ms
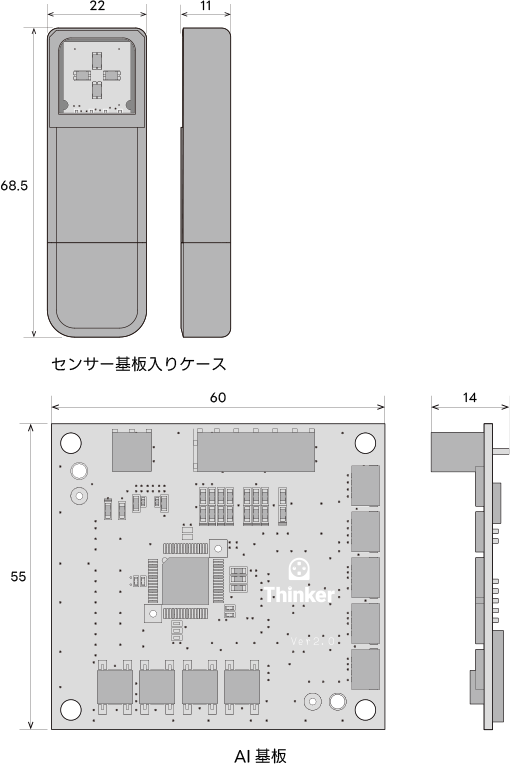
センサー部サイズ
69mm(L) × 22mm(W) × 11mm(D)
AI基板サイズ
55 mm (L) × 60 mm (W) × 14 mm (D)
センサー部重量
約35g(ケーブル1m を含む)
使用周囲温度
0 ~ 40 ℃ (結露なきこと)
電源電圧
DC5V
防水・防塵
IP65(予定)
外形寸法図(単位:mm)
※通信方式はカタログを参照ください。
※仕様は予告なく変更されることがあります。
( Q&A )