自動車用補修部品の梱包工程




適用工程
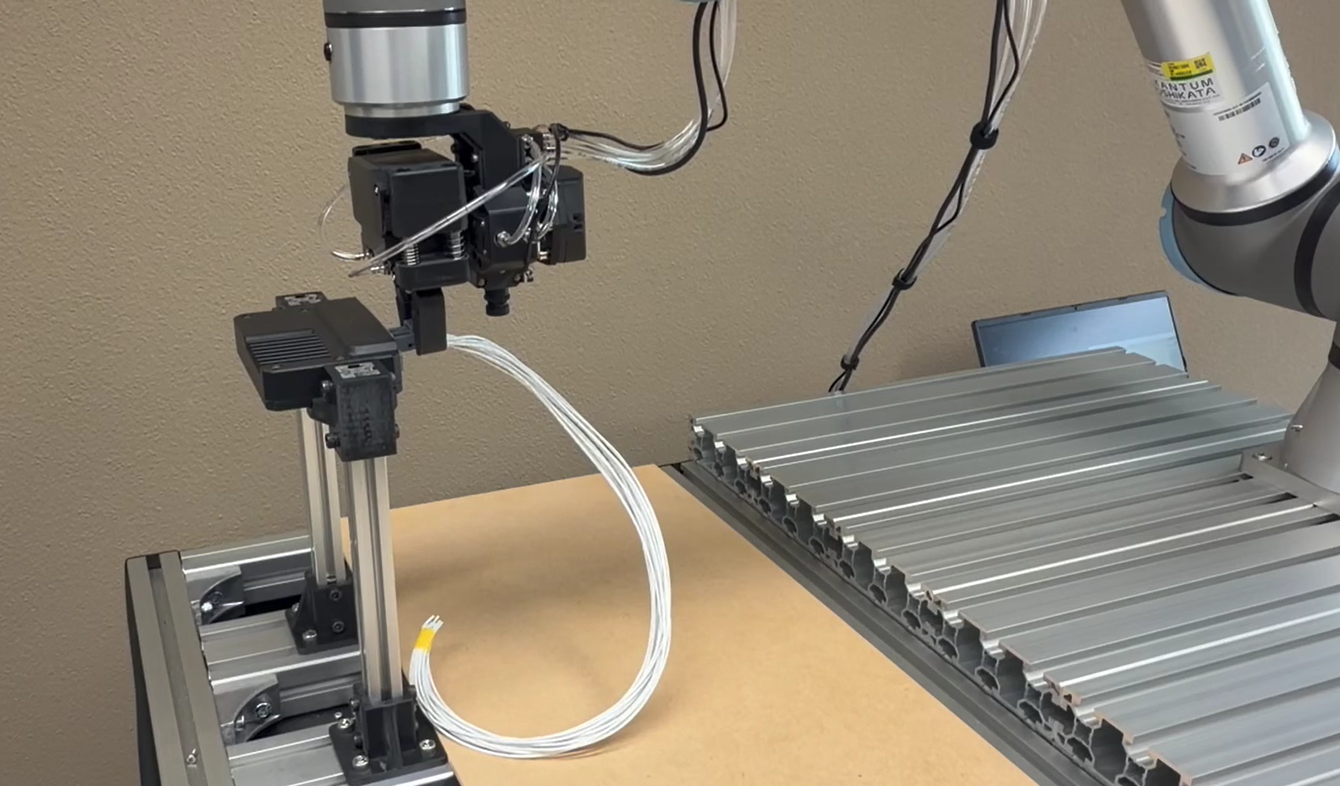
自動車用補修部品の梱包作業ラインにおいて、部品を1つずつ袋へ投入し、包装機で封をする工程。 導入前は、作業者が部品を手に取り、包装機にセットされた袋へ投入し、その後、包装機を操作して封をする作業を行っていました。導入後は、Thinker Model Aがバラ積み部品を1つピックアップし、所定の袋へ投入。連動する包装機が自動で封を行う。 那須梱包株式会社に導入。
導入前の課題
- 作業者が部品投入と包装機操作を同時に担っていた
- 1人が対応できる包装機・作業量に限りがあった
- バラ積みされた部品は位置や姿勢がばらつき、自動化が難しかった
- 将来的な労働人口減少を見据え、生産性向上が求められていた
- 性別、年齢、障がいの有無にかかわらず働きやすい現場づくりが必要だった
システム構成・仕様概要
Thinker Model Aを導入し、バラ積み部品のピックアップから袋投入までをロボットが担う構成に変更。
経営効果
- 梱包工程の自動化
- 作業者1人が複数種類の部品梱包を担える体制づくり
- 作業効率の向上
- 人手不足への対応
- 作業者の能力を拡張する「人間拡張」型の現場づくり
- 就労対象者の拡大
- 障がい者雇用を含む多様な人材の活躍促進