PRODUCT
Thinker Model A
人手不足解消の切り札、
協働ロボットパッケージ
PRODUCT
人手不足解消の切り札、
協働ロボットパッケージ
( ABOUT )
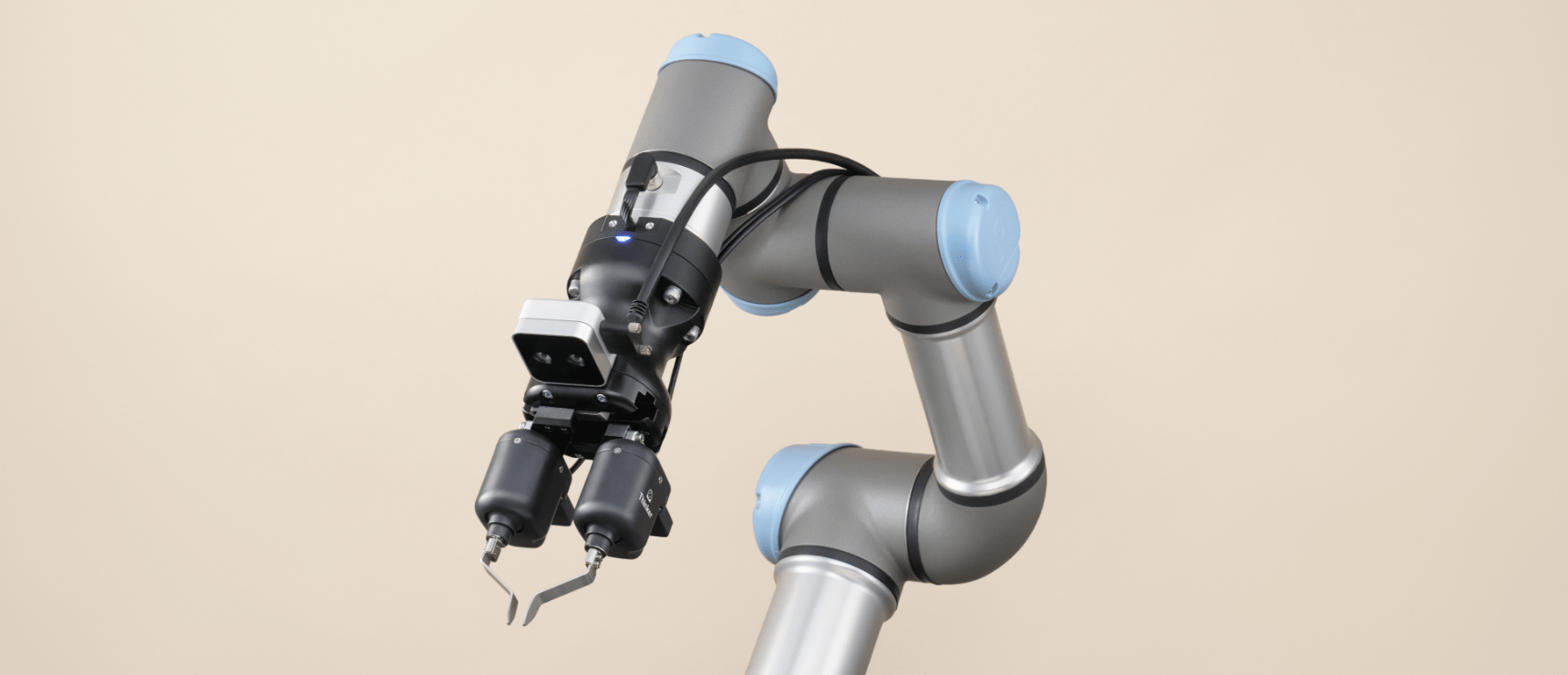
人の指のような動きでピッキングできる独自のロボットハンド「Think Hand F」とカメラシステムを組み合わせて、多彩かつ柔軟なピッキングを実現したバラ積みピッキングロボット。製造現場の省人化・効率化を促進します。
“なかなか自動化できなかった
ピッキング作業” を
ロボットハンドパッケージで解決
( FEATURE )
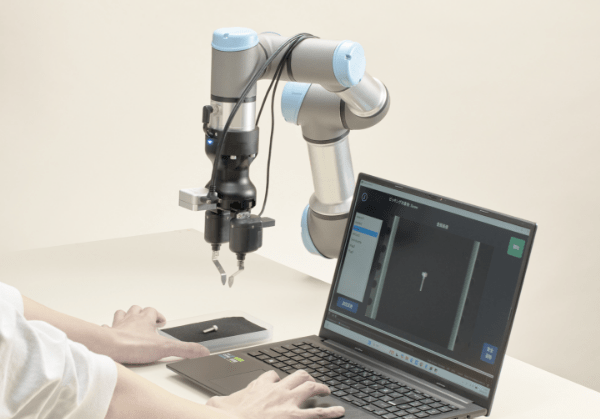
ロボット本体とロボットハンド、カメラ、それに基本プログラムをインストールしたノートPCをパッケージ化し、高い専門知識がなくても導入が可能に。導入の立ち上げ工数を大幅に減らし、早期の運用開始を実現。
・基本プログラムの作成不要
・画像の初期登録不要
・カメラの選定不要
FEATURE #01
FEATURE #02
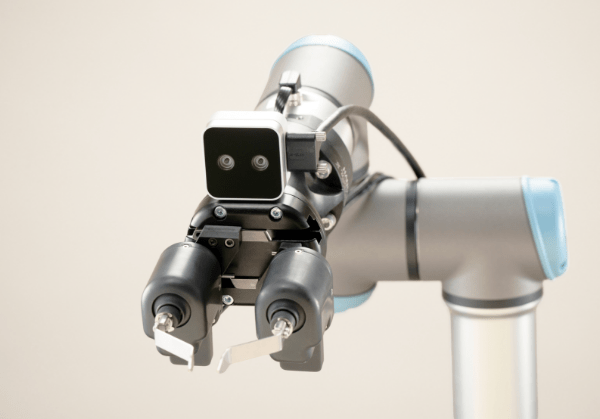
「Think Hand F」に内蔵されている近接覚センサーが持つ最先端の立体センシング力とカメラを組み合わせることで、高精度な3D計測システムを低コストで実現。カメラをロボットのアーム先端に設置できるため、カメラ専用フレームがいらない省スペースでの運用もできます。
ランダムに積まれた部品や、位置がずれやすいワーク(把持する対象物)、繊細な扱いを求められるワーク等、難度の高い作業も可能に。

FEATURE #03
FEATURE #04
新たに開発した画像処理システムにより、把持するワーク(対象物)をシステムに記憶させる準備工数を大幅に短縮。登録時間が20分の1に。登録はワークを搭載カメラで撮影するだけ。多品目を扱う現場でも柔軟な運用が可能です。※当社「2025年1月モデル」と「2025年6月モデル」の比較。
( STRUCTURE )
( 01 )
( 02 )
( 03 )
( LIST )
製品名
型番
対応アーム
Thinker Model A
COBOTTA
対応モデル
TMA-CO
デンソーウェーブ COBOTTA
Thinker Model A
UR3e対応モデル
TMA-U3e
ユニバーサルロボット UR3e
Thinker Model A
UR7e対応モデル
TMA-U7e
ユニバーサルロボット UR7e
※対応アームは今後も追加予定
( Q&A )

