PRODUCT
Think Hand F
“つかむ”も“置く”も
手探りできるロボットハンド
PRODUCT
“つかむ”も“置く”も
手探りできるロボットハンド
( ABOUT )
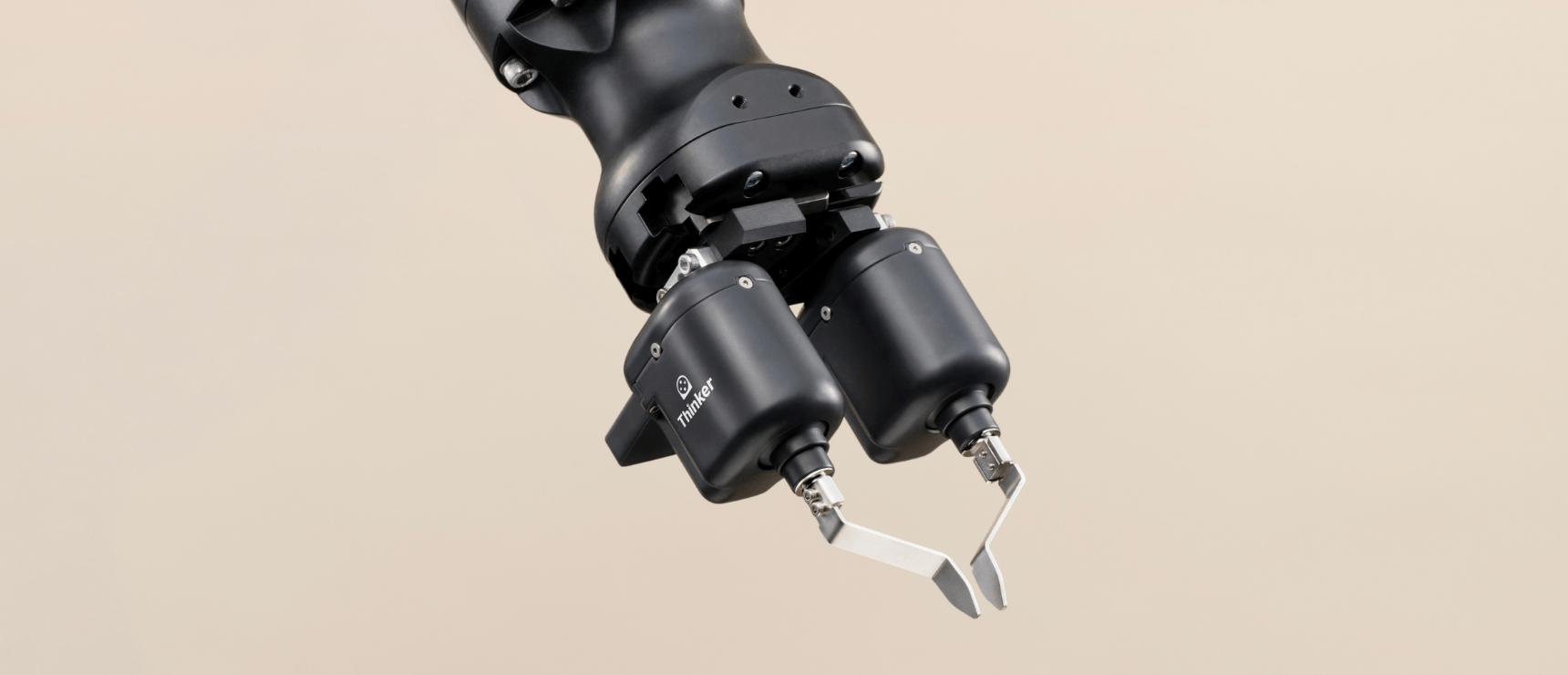
近接覚センサーを備えた「インテリジェントフィンガー」を組み合わせたロボットハンド「Think Hand F」は、人の指先のように「なぞって、まさぐり、つかみにいく」動作で柔軟なピッキングを実現します。部品や食品のばら積みピッキングが容易になり、導入が諦められていた現場を含めてロボットハンド活用の幅が広がります。
「なぞって、まさぐり、つかみにいく」
( FEATURE )
近接覚センサーを備えた「インテリジェントフィンガー」により、対象物の形状に応じて自在に対応できるソフトタッチ制御を実現しました。カメラシステムでは対応が困難だったばら積み部品に対しても、「なぞって、まさぐる」ことで位置や姿勢を特定して「つかみにいく」ことができます。さらには、不定形なものや柔らかいもののピッキングにも対応できることから、ロボットハンドの導入・活用領域が格段に広がります。

FEATURE #01

FEATURE #02
「Think Hand F」のインテリジェントフィンガーは、内蔵された近接覚センサーの高精度なセンシングにより、”指先”の把持状況を瞬時に検知。ロボットハンドの作業効率を左右する「把持の精度」を向上させるだけでなく、把持の成否をリアルタイムで認識・判断します。素早いリトライ(つかみなおし)が可能となるため、生産効率のアップに貢献します。
固定の座標でのピッキングを原則としてきた従来のロボットハンドとは異なり、「Think Hand F」は “指先”を対象物に接触させながら、「なぞって、まさぐり、つかみにいく」動作を実現します。その状況に応じて柔軟な対応ができることから、事前のティーチングの手間が大幅に軽減され、運用のハードルも低くなります。
FEATURE #03

FEATURE #04
ランダムに積まれた部品や、位置がずれやすいワーク(把持する対象物)、繊細な扱いを求められるワーク等、難度の高い作業も可能に。
( STRUCTURE )
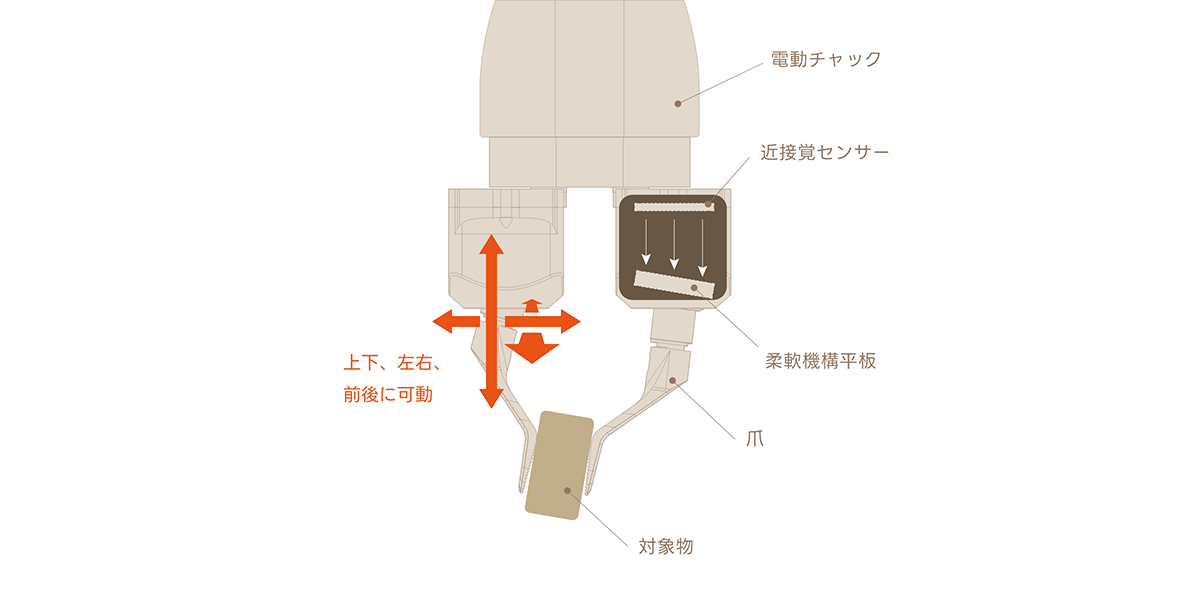
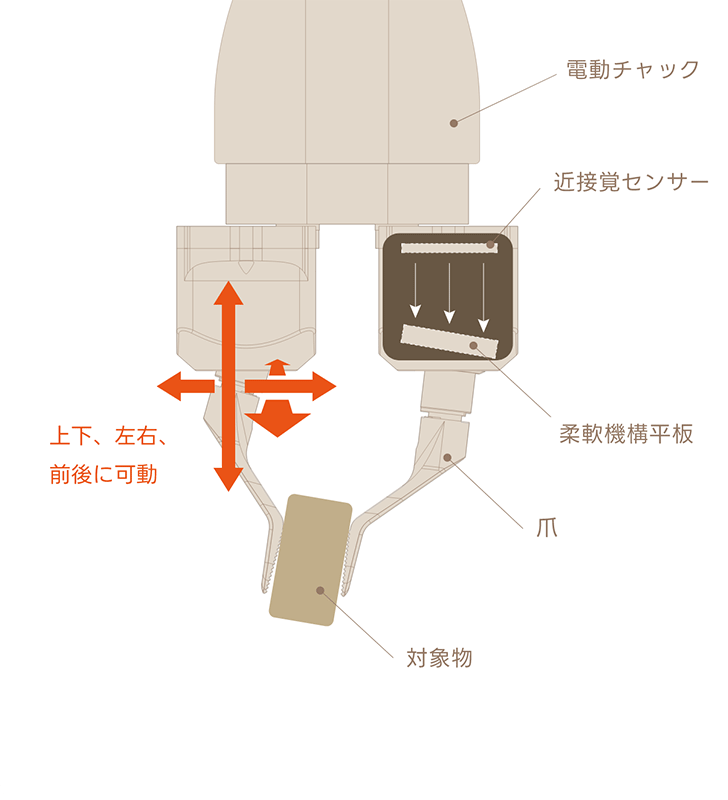
( 01 )
近接覚センサーが、対象物との距離や角度をリアルタイムで計測。取得した情報をフィードバックし、対象の状態を把握。
( 02 )
対象物の状態に応じて、つかみやすい姿勢へ自動で補正。指の柔軟な構造が形状の違いや傾きを吸収し、対象物に合わせてピッキング。
( 03 )
つかんだ状態をリアルタイムで確認し、成功を判定。うまくつかめていない場合は、すばやくリトライ。接触を検知しながら、やさしく配置することも可能。
( SPEC )
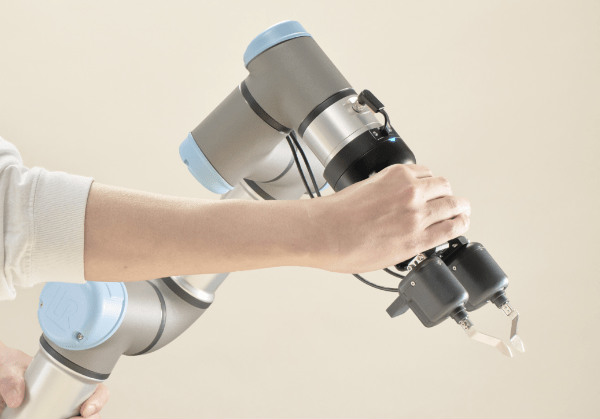
ハンド寸法
102mm × 82mm × 98mm ※グリッパ部を除く
可搬重量
UR取付時:800g、
COBOTTA取付時:250g
※当社指定グリッパ使用時
本体重量
250g ※グリッパ部を除く
電源電圧
DC5 V
使用温度
0~40℃
サンプリングレート
最大200Hz
対応可能な協働ロボットの種類についてはお問い合わせください。
※可搬重量は使用されるロボットにより異なります。詳細はお問い合わせください。
※仕様は予告なく変更されることがあります。
( Q&A )