Robot Hand with the Intelligent FingersThink Hand F (Prototype)
“Think Hand F,” a robot hand having the “intelligent fingers” equipped with Pre -Touch Sensor
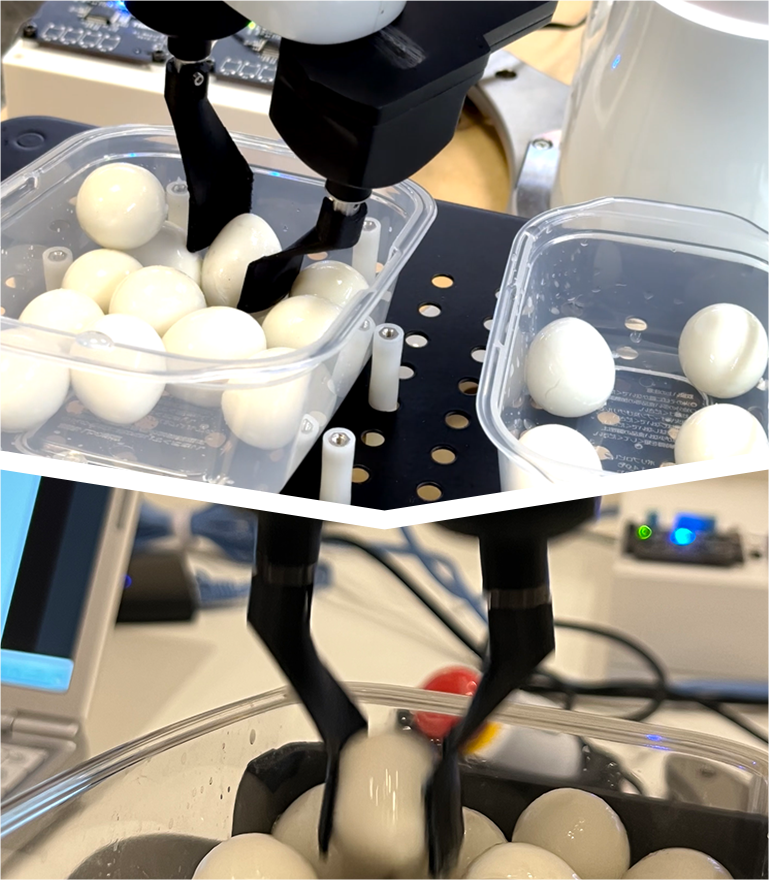
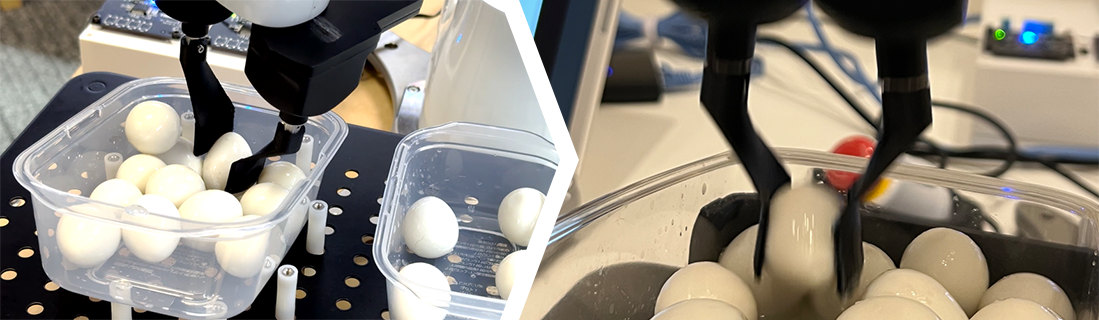
flexibly picks up objects with the movement of “tracing, feeling around and actively picking up” like human’s fingertips.
It easily picks up parts and foods which are piled up untidily,
realizing the broader application of robot hands in various areas including the sites where the use has been given up.
“Tracing, feeling around and actively picking up”Features of the robot hand with the intelligent fingers
-
01
Soft touch control comparable
to human’s fingertips“Intelligent fingers” with the Pre -Touch Sensor have achieved soft touch control for flexible handling of objects in various shapes. The product can identify the location and position with the movement of “tracing and feeling around” and “actively pick up” parts which are piled up untidily whose handling is difficult under the camera system. Furthermore, the ability to pick up irregularly shaped objects or soft objects has greatly broadened areas for introduction and use of robot hands.

-
02
Quick retry by detecting grip situations
The intelligent fingers of “Think Hand F” instantly detect grip situations of the “fingertips” by highly accurate sensing of the incorporated Pre -Touch Sensor. In addition to the improvement of “grip accuracy” which decides working efficiency of robot hands, the product recognizes and judges success or failure of gripping in real time. The product enables quick retry (holding again), contributing to the improvement of production efficiency.

-
03
Operable with rough teaching
Unlike conventional robot hands for which picking at fixed coordinates is a principle, “Think Hand F” can “trace, feel around and actively pick up” objects while touching the objects with its “fingertips.” Flexible response depending on the situation greatly reduces time and efforts for teaching in advance, lowering the hurdle of operation.

Mechanism of Think Hand F
-
01
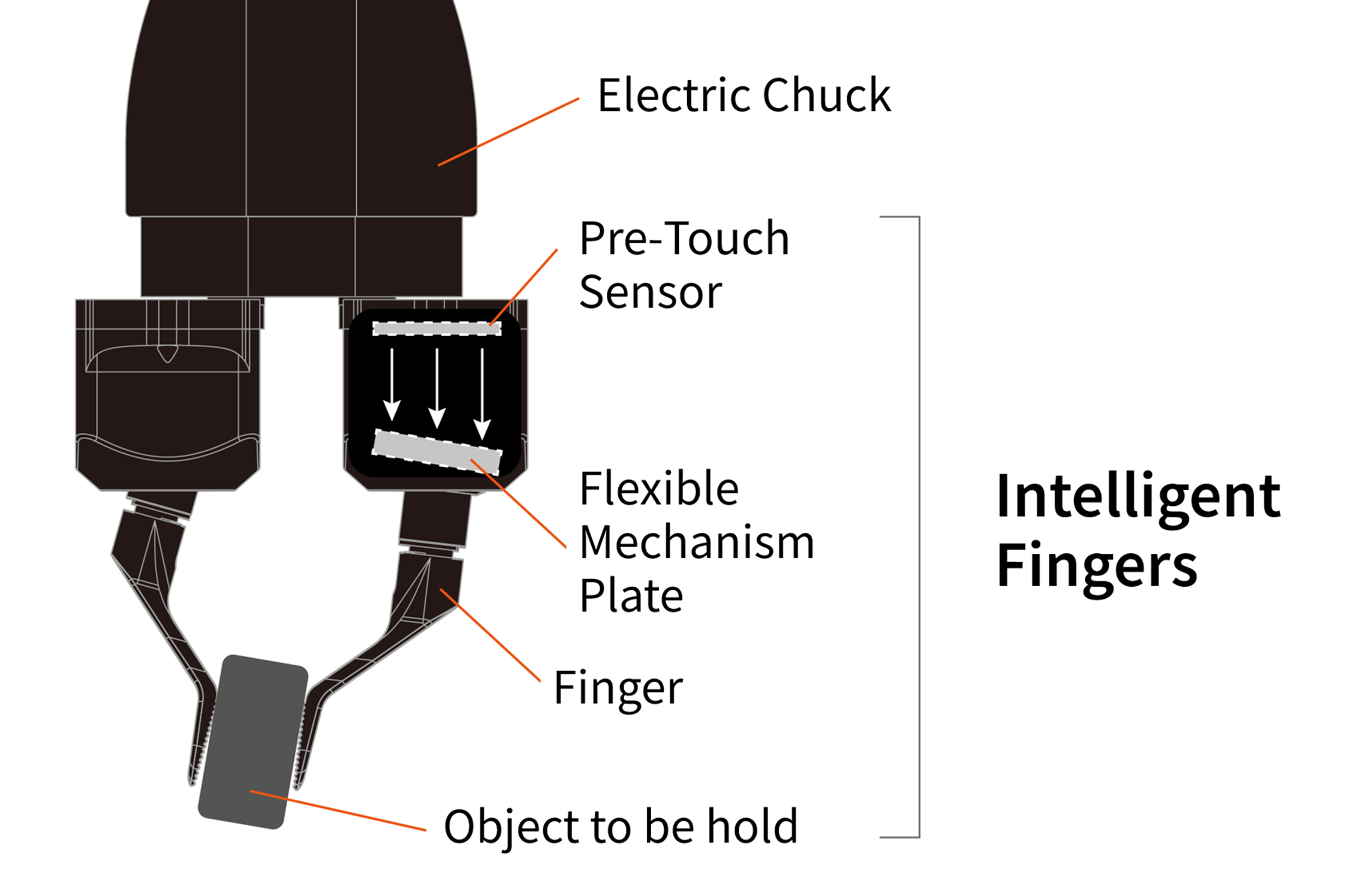
Soft touch control by the intelligent fingers with Pre -Touch Sensor
The fingers which move flexibly for each object recognize the shape of the object by constantly measuring the angle and distance of the flexible mechanism plate.
-
02
Reflecting the position of the intelligent fingers to robot control
Pre -Touch Sensor recognizes the position of fingers and reflects it to robot control at high speed, which ensures picking up according to objects.
Specifications Overview
-
Hand Dimensions
102 mm × 82 mm × 98 mm *Excluding gripper unit
-
Load Capacity
ca. 300 g *When company-specified gripper is used
-
Body Weight
180 g *Excluding gripper unit
-
Source Voltage
5 V
-
Operating Temperature
0 ~ 40 ℃
-
Sampling Rate
Max 200 Hz
*The payload may vary depending on the robot used. Please contact us for more details.
*Specifications may change without notice.
FAQs
- I’d like to know the operating principles.
- See Mechanisms of Think Hand F.
- I’d like to know the minimum workpiece size that the hand can hold.
- It depends on workpiece shapes or the number of pieces to be hold at one time. Contact us for details.
- I’d like to know the maximum weight of workpieces that the hand can hold.
- The hand can hold up to approx. 300 grams when attached to Cobotta used in our video.
Contact us for customization. - How much gripping force does the hand have?
- Around 1 N for the prototype under development. Contact us for customization.
- After purchase, does the product require machine learning each time when workpieces are changed?
- Pre -Touch Sensor after machine learning is incorporated in Think Hand F. New machine learning is not required on your side.
- I’d like to know the environment-resistant performance.
- For the prototype under development, operating temperature ranges from 0°C to 40°C, and the prototype does not have dustproof/waterproof function.
*In the case of use in an environment where oil is floating in the air or liquid is directly sprayed onto the box of Pre -Touch Sensor, please take certain measures to prevent liquid from entering the box. - How is communication established with a robot?
- Serial data from TK-01N is imported into a small LinuxPC, open width of the fingers and depth that the fingers needs to go are calculated, and the command of fingertip coordinates is sent to the robot controller.
See the pamphlet for the Transmission Method. For pamphlets, Contact us from here. - I’d like to know types of robots for which the product can be used.
- Robots with an external control mode or robots with electric chuck for which external control is available can be used.
Contact us for more information regarding robots that are connection-compatible. - What program is necessary for the robot controller?
- In the case of external remote control of the robot from an intermediating small PC, the robot controller only requires setting related to the remote control and the range of motion, etc.
- Can the types of fingers be changed?
- Contact us about your specific request.